Victor 888
The victor is similar to the jaguar, but sacrifices computing power for a lighter weight and a smaller size.
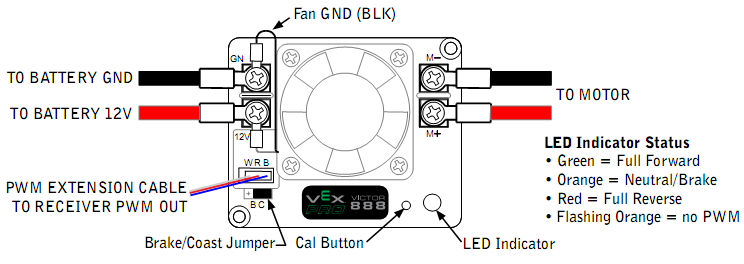
When wiring, make sure that the PWM is plugged in so that the black wire is facing the inside (towards the fan). Pay special attention to the M+ M- V+ and V- on the sides of the Victor when wiring it to the motor and the power distribution board.
➠ Sample Code
#include "WPILib.h"
class RobotDemo : public SampleRobot {
Victor victor;
Joystick stick;
public:
RobotDemo(void):
victor(1),
stick(1)
{
}
void OperatorControl() {
if(stick.GetRawButton(1)) {
victor.Set(1.0);
}
else if(stick.GetRawButton(2)) {
victor.Set(-1.0);
}
else {
victor.Set(0);
}
}
};
START_ROBOT_CLASS(RobotDemo);
➠ Explanation
Victor victor;
Declare victor motor controller as victor; declared between public SampleRobot and public : RobotDemo
victor(1),
Initialize victor motor controller as port # 1 in Digital sidecar PWM Out. This is stated between public : RobotDemo and the braces({ }). If it is not the last object initialized, it needs a comma like a list. If it is the last object initialized, no punctuation; no comma, no semicolon, no period, etc. or you will get an error.
void OperatorControl() {
if(stick.GetRawButton(1)) {
victor.Set(1.0);
}
else if(stick.GetRawButton(2)) {
victor.Set(-1.0);
}
else {
victor.Set(0);
}
}
Joystick class is gone into depth in an earlier section of this manual. Motor controllers are put into results of conditions because a free-spinning motor is a waste of power and there is no control over the motor (which is why it is a motor controller) The .Set method of the class accepts a float between -1.0 to 1.0 as a parameter which sets the speed of the motor to that float. 1.0 is full speed “forward”, -1.0 is full speed “backward.” The motor when initialized begins at .Set(0). The else victor.Set(0) is to stop the motor; unless the motor controller is set to 0, the motor remains at the last .Set() value.
NOTE: The 883, 884 and 885 models have been discontinued, but the manufacturer’s documentation can be found below.